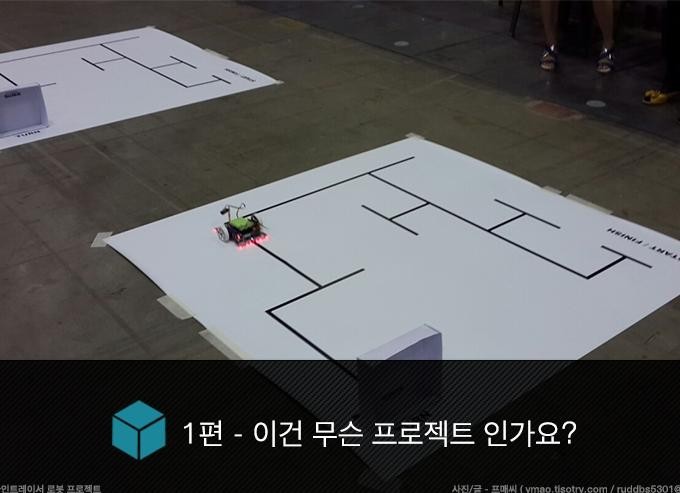
라인트레이서 로봇을 가지고 미로찾기를 해보았습니다.이젠 직접 프로그래밍을 해서 라인을 따라는 것이 아닌 인공지능으로!
1편에서는 간단한 프로젝트 소개와 앞으로 사용할 라인트레이서 맵, 로봇에 대한 환경을 살펴보았습니다.
2편에서는 본격적으로 알고리즘에 대해 생각해봅니다. 미로찾기를 하기 위해서는 맵의 정보를 알아야겠죠?